
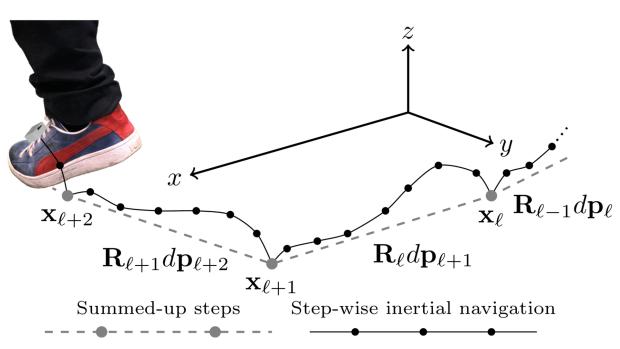
Photo : OpenShoe Project
On 14 June 2017, tragedy struck an apartment block in Chelsea, West London, when a gigantic fire engulfed it, resulting in 80 fatalities and severely injuring many. Fire-fighters fought the blaze for 24 hours before bringing it under control, while rescuers were rummaging through the burning rubble, to find survivors. Wouldn’t it be useful if one could efficiently monitor the entire rescue operation and help rescuers reach the exact positions of stranded people to save lives amidst all the smoke and rubble?
The OpenShoe project -- a collaborative effort by KTH Royal Institute of Technology, Stockholm, Sweden, and the Indian Institute of Science (IISc), Bengaluru, with support from the Department of Science and Technology (DST), Govt. of India and VINNOVA, the Sweden’s innovation agency – is now stepping towards making such tracking a reality! Built on Inertial Navigation System (INS), OpenShoe started as an academic project developed to track the velocity and position of one’s foot, to track his or her movement. “The project is about developing an indoor positioning system”, remarks Prof. KVS Hari, Chair of the Department of Electrical Communication Engineering at IISc, and a research investigator of the OpenShoe project along with Prof. Peter Handel from KTH.
“It was meant to be used by rescue and fire fighting teams which enter a building devastated by a fire, earthquake or an attack. The rescuers enter the building and the command team outside can monitor each team member’s location with an accuracy of up to one meter”, says Prof. Hari adding that such INS systems work without extra infrastructure, like Wi-Fi or satellites, unlike other navigation systems.
The OpenShoe project (http://www.openshoe.org) has contributed significantly in the understanding of inertial systems and pedestrian navigation. After successfully designing and developing the foot-mounted sensor capable of transferring their data to a receiver through Bluetooth, the researchers could now make shoes with these sensors. The project has been ‘open-sourced’ since its inception, putting out all its designs and software in the public domain.
Satellite Navigation Vs Inertial Navigation
How does the Inertial Navigation System differ from the well-known Global Navigation Satellite System (GNSS) that powers the maps in our smartphones or our cars? GNSS uses a network of satellites in low-earth orbits that beam down signals which are received by electronic receivers to pinpoint a location using information regarding the latitude, longitude and altitude. Though this system is highly accurate, there is a frustrating drawback -- these devices need to have a clear line of sight with the satellites to work. When one has to navigate within buildings or drive through areas with high-rise buildings, this line of sight is disrupted, and the navigation system ceases to work until the line of sight is restored.
Inertial Navigation System, on the other hand, uses a computer and inertial sensors, like motion and rotation sensors (accelerometers and gyroscopes), to track the position and orientation of an object. Once an initial position is known, a computer can use data from the sensors to calculate the velocity and orientation of an object. Using a technique called ‘dead reckoning’, the computer continuously tracks the position and orientation of the object relative to its initial position using the estimated speed of the object over elapsed time. In addition, unlike GNSS, INS is a ‘self-contained’ navigation technique that does not need satellites or Wi-Fi connectivity to track an object.
But this convenience comes at a cost -- the ‘dead reckoning’ technique suffers from accumulation of small errors with successive position estimates, resulting in larger deviations over time. Hence INS is still waiting to reach a widespread adoption akin to satellite based navigation systems like the USA’s Global Positioning System (GPS).
Yet, when you are in an elevator or driving through cities like New York, INS may still be a game changer in making your navigation system work without a glitch. “Inside a building, satellite navigation does not give an accurate position estimate because of problems like loss of signal. It works really well in a satellite friendly environment like open spaces, but in a devastated building, which is where we want our device to work, satellite navigation doesn’t do so well”, explains Prof. Hari. In fact, the modules from the OpenShoe project have already been tested by Swedish firefighters in a mock drill session, and the feedback has been positive.
Niche application of INS are increasingly found in missile systems, artificial intelligence robots and rovers, and even in our smart phones and watches, allowing runners and athletes to track where, how far and how fast they run each day. And that is why INS is now gaining traction, and spinning off successful start-ups like Inertial Elements based on the OpenShoe project.
Inertial Elements – Stepping towards success with INS
Inertial Elements, founded by Mr. Amit K Gupta along with Prof. Peter Handel and John-Olof Nilsson, supervisors of OpenShoe from KTH in 2014, is currently incubated at IIT-Kanpur. “We focus on precision shoe-mounted sensors (also known as Pedestrian Dead Reckoning or PDR sensors) for indoor positioning”, says Mr. Gupta, who also worked on the hardware design of OpenShoe. “Our high performance, affordable and easy-to-use miniaturized inertial sensor platforms enable many niche applications such as indoor pedestrian navigation, industrial safety and resource management, positioning system for rescue agents, autonomous robotics, gaming, treatment of movement disorders and understanding the physics of motion”, says Mr. Gupta.
Realising the potential INS has in such applications, the founders of Inertial Elements ventured into building ‘oblu’ -- an open source, wearable, motion sensing development board that acts as a development platform for motion sensing and robot navigation. For a cost, oblu will provide a pedestrian navigation sensor and the associated software that can be implemented into various motion sensing applications. If you fancy building an autonomous robot or a tracking collar for your pet, ‘oblu’ is your go-to device that allows customisable hardware and software. “oblu is a development board for students, DIY hobbyists, navigation and robotics researchers”, remarks Mr. Gupta. Besides this, ‘oblu’ has been used as a teaching aid in laboratories.
Towards a universal navigation system
With technologies like the Internet of Things, everything around us is turning ‘smart’, ‘context-aware’ and ‘intelligent’. Navigation systems and sensors, needless to say, play a key role in building ‘smarter’ systems for the future. While technological advancements like laser-based accelerometers and gyroscopes have been built to address the accuracy of Inertial Navigation Systems up to centimetre scale, scientists and researchers are now trying to combine INS and GNSS to build a universal navigation system that works everywhere – be it your car basement or the open skies of Maldives.
And the idea is already catching up -- luxury automobile manufacturers like Tesla and Mercedes Benz have already implemented a combination of GNSS and INS to provide such a universal navigation system that work everywhere. “GPS and INS are complimentary to each other. One is good for outdoors, while the other is good for indoor positioning. Therefore, these two together can make for a great universal positioning system”, signs off Mr. Gupta, hoping the future of navigation combines the best of both worlds.
















 and Radial alignment of cells on a soft inhomogeneous substrate with an embedded glass bead at the center (right half) Credits: Michael Morse via pexels and Dr Akshada Khadpekar. (Lead author of the study)")






. (A) Dorsal View, (B) Ventral view, (C) Profemur, (D) Head and (E) Tarsal Claw. Credit: Authors")
